在现代工业自动化领域,伺服定位系统扮演着至关重要的角色。
作为精密控制的核心组成部分,伺服系统广泛应用于各种机械设备中,以实现高精度的运动控制。
作为工程实践的重要一环,本文将以实践应用案例的形式,深入探讨FX3U伺服定位定位程序的应用及其在实际生产过程中的效果。
通过具体案例分析,我们将充分展示理论知识的实践应用以及实践如何检验理论的真实价值。
本文基于工程实践经验撰写,旨在提供实际操作参考和指导。
FX3U伺服定位系统是一种先进的运动控制系统,具备高精度、高速度和高稳定性等特点。
该系统广泛应用于各种工业自动化设备中,如数控机床、工业机器人、自动化生产线等。
其核心组成部分包括伺服驱动器、电机以及控制器等。
通过精确的算法和控制策略,FX3U伺服定位系统能够实现精确的定位、速度和加速度控制。
在实际应用中,FX3U伺服定位系统能够满足各种复杂运动控制需求,提高生产效率和产品质量。
为了充分展示FX3U伺服定位程序的应用效果,我们将以一个具体实践案例为例进行介绍。
本案例涉及一台自动化生产线中的物料分拣机器人。
该机器人需要精确地完成物料抓取、移动和放置等任务。
在这个过程中,伺服定位系统的应用显得尤为重要。
物料分拣机器人需要按照预设的轨迹进行运动,同时完成精确的物料抓取和放置任务。
为了实现这些功能,我们采用了FX3U伺服定位系统。
通过精确的伺服控制,机器人能够准确地到达指定位置,实现高精度的物料分拣。
(1)系统搭建:我们选择了合适的伺服驱动器、电机和控制器等硬件设备,并进行了系统的搭建和调试。
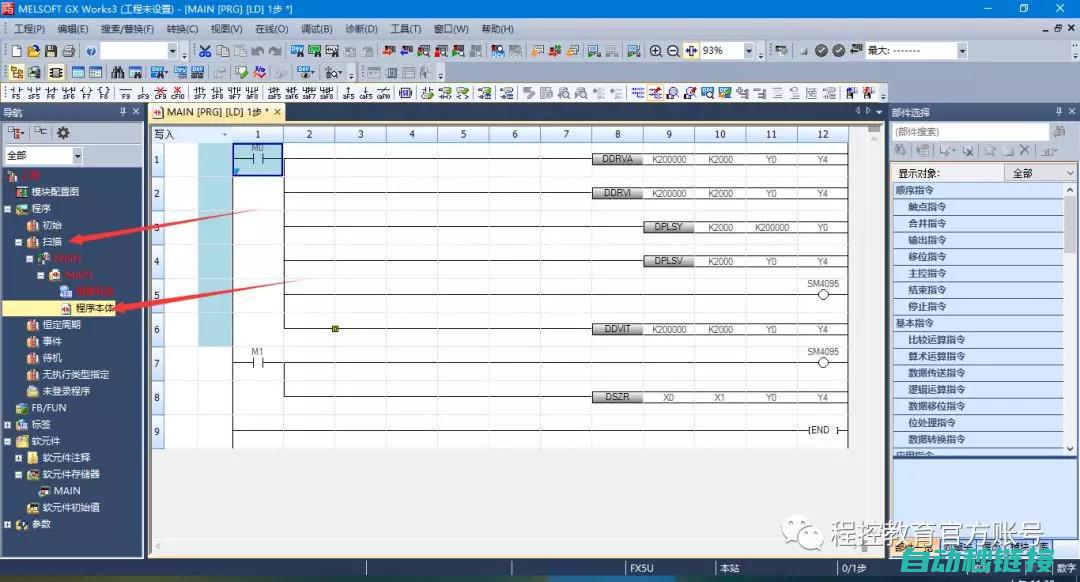
(2)程序设计:根据实际需求,我们设计了一套FX3U伺服定位程序。该程序包括定位控制、速度控制、加速度控制等功能模块。通过精确的算法和控制策略,实现了机器人的精确运动控制。
(3)调试与优化:在实际应用中,我们对程序进行了调试和优化。通过调整参数和策略,使得机器人能够更精确地完成任务。同时,我们还对系统进行了抗干扰处理,提高了系统的稳定性和可靠性。
通过实际应用,我们发现FX3U伺服定位程序在物料分拣机器人中取得了显著的应用效果。
机器人的定位精度得到了显著提高,能够准确地完成物料抓取和放置任务。
系统的响应速度和稳定性也得到了显著提升,提高了生产效率和产品质量。
通过程序的优化和调试,我们还发现系统的抗干扰能力得到了增强,能够在复杂的工业环境中稳定运行。
通过本实践应用案例,我们深刻体会到了实践的重要性。
理论知识只有在实际应用中才能得到真正的检验和完善。
同时,通过实践,我们还能够发现理论知识的不足之处,为进一步的研发和改进提供依据。
因此,实践是检验真理的唯一标准。
本文通过一个具体实践应用案例,深入探讨了FX3U伺服定位程序的应用及其在实际生产过程中的效果。

通过实践应用,我们充分展示了理论知识的实践应用以及实践如何检验理论的真实价值。
希望本文能够为读者提供实际操作参考和指导,推动工程实践领域的发展。